LiDAR (Light Detection and Ranging) is based on the principle of measuring distance through the speed and intensity recorded for a pulse of light to be fired from sensor equipment and reaching a target, before sending a return signal. The introduction video below, produced by the Darent Valley Landscape Partnership, explains LiDAR technology and the benefits for conservation in the landscape, as well as how the surveys are flown (including a portion of the East Surrey data).
Lidar Technology
Airborne LiDAR systems rely on echo location to measure distance from the sensor to a target, in this case the ground and any features upon it. LiDAR sensors commonly operate by scanning a laser beam from side to side as an aircraft flies over the survey area and recording the reflections. A cloud of height points is created from these reflections which can then be turned into 3D models of the landscape.
Although LiDAR systems were developed in the 1960s, it was the widespread developments in Global Positioning Systems in the late 1980s that allowed for the creation of the highly accurate land surface models which we are familiar with today.
In the UK it was The Environment Agency who instigated the widespread use topographic LiDAR from 1996 onwards for the production of terrain maps to assess flood risk. Although it is particularly well-known and useful in wooded areas, LiDAR can also assist archaeologists in recognising earthworks and other features otherwise difficult to detect in open ground.
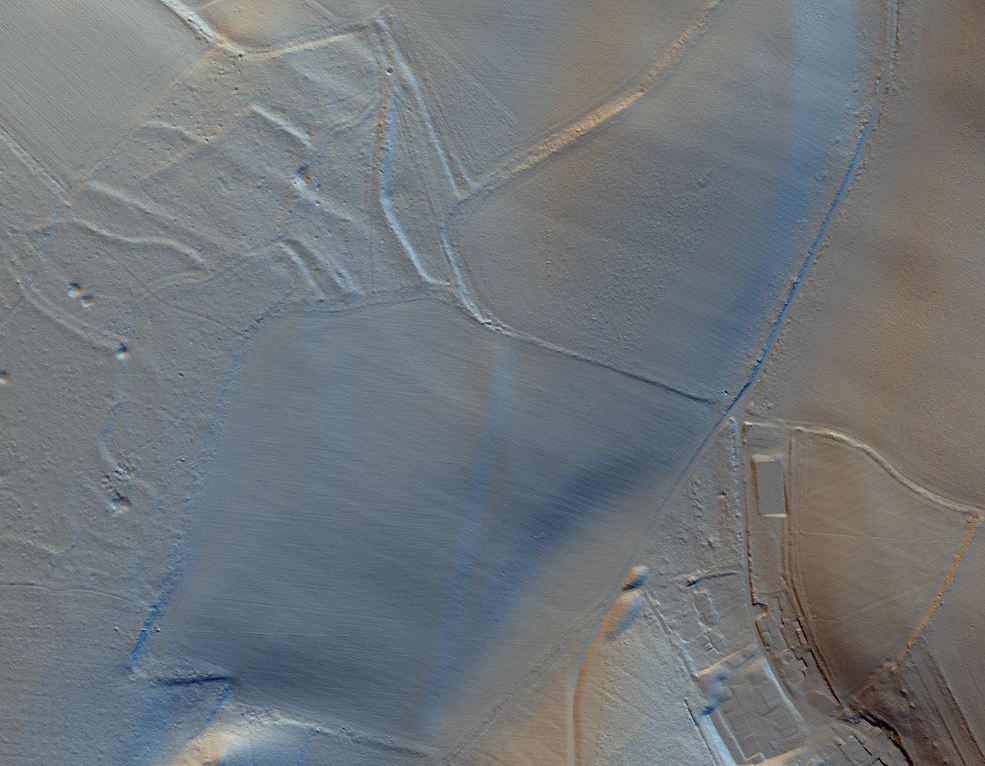
In order to visualise the data easily, a surface is created which can be modelled and shaded as a raster image. The most common raster images differ based on the point at which the pulses are returned to the sensor and the resulting data is processed. The Digital Surface Model (DSM) is the first return or highest point of pulse return, usually showing the whole landscape, including the ground surface in open areas, vegetation, woodland canopy and buildings. The Digital Terrain Model (DTM) is created by filtering the LiDAR dataset to remove all non-ground returns such as those that reflected from vegetation and buildings. This filtering allows features under the vegetation canopy to be visualised.